What does safe driving mean to you?
The importance of knowing what is around you and what they might do next
June 2025
According to the World Health Organisation, road crashes are the leading cause of death for children and young adults aged 5-29 years old. The Safe System approach to road safety adopted by many countries and transport authorities means eliminating the collisions that cause death and serious injury. At present, human drivers are responsible for almost all driving on public roads but we are entering a period of transition where some vehicles will be operated by automated driving systems. This could mean regular looking vehicles that are capable of doing some of the driving some of the time - for example, the Mercedes-Benz Intelligent Drive system, which will take responsibility for safe control of the vehicle within certain parameters on highways. Alternatively, it could be vehicles that are entirely designed for operation without a human operator on board, such as the automated passenger shuttle vehicles from Ohmio and Aurrigo. There is much anticipation that automated vehicles (AVs) will greatly decrease the number of collisions and thereby reduce the tragic loss of life caused by road crashes but what does it mean for an AV to be considered ‘safe’?
One could assume that a safe journey is one in which a vehicle did not hit anything else. However, if a vehicle came close to being involved in a serious crash, failed to comply with particular road rules or swerved late narrowly missing pedestrians, any reasonable observer would consider the driver of that vehicle to be displaying unsafe behaviours. It follows that, were such a driver to continue to adopt such behaviours, then a serious crash would be more likely than if they behaved in a more compliant manner. Safe driving means being constantly aware of your surroundings and anticipating what others might do next. This awareness separates experienced drivers from novices and helps to prevent dangerous situations before they arise and not just respond to them.
Public perception is also an important element of safety. If the relative rate of crashes caused by AVs were lower than that for human driven vehicles, it would mean that road safety per mile driven had been improved. However, if crashes caused by AVs disproportionately affected a particularly vulnerable group or occured in conditions that seem benign for human drivers, the public appetite for AVs may be adversely affected. Similarly, vulnerable road users could feel anxious because of the way AVs behave. For example, if AVs pass too close to pedestrians or pull out from side roads causing motorcyclists to take avoiding action. Although they may not result in crashes, such behaviours may cause the public to reject the presence of AVs and as a consequence, society could miss out on the safety benefits that AVs may offer. The challenge then is how to enable AVs to achieve acceptable driving performance in ways that go beyond counting of crashes and that explore what it truly means to be safe.
A key determinant of safety is perception - the ability to detect and resolve objects in your vicinity. Current AV perception stacks often combine multiple sensors, such as cameras, lidar, and radar, often mounted in multiple locations to achieve 360 degree coverage around the vehicle. Fusing data from this combination of sensors can compensate for the shortcomings in any individual sensor. However, installing multiple sensors in multiple locations increases cost and complexity for the vehicle developer.
The UK-based award winning start-up, Oxford RF, is addressing these challenges with a new generation of radar systems that promise to redefine what is possible in automotive perception. By delivering wide coverage, high-resolution imaging, and robust performance in all conditions, Oxford RF’s radar systems enhance vehicle awareness, improve safety, and do so at a lower cost than traditional multi-sensor arrays.
A standout feature of Oxford RF's radar technology is its ability to achieve full 360-degree coverage with fewer units than typical sensor configurations. Traditional automotive radar systems offer a horizontal field of view of less than 180-degrees. This can therefore necessitate the use of as many as eight radar units mounted at the corners and on the sides of the vehicle to get sufficiently overlapping fields of view (see Figure 1).

Figure 1. Fitment of eight traditional automotive radar units (one at each corner, one on each side) to give sensor coverage around a vehicle. Coloured regions show locations of monostatic (single radar field of view), bistatic (two overlapping radar fields of view) and tristatic (three overlapping radar fields of view) coverage with some regions not covered.
Oxford RF’s individual solid state radar units have up to 360-degree horizontal field of view. A radar unit mounted at each corner of the vehicle (four units in total), each with around 270-degrees of coverage gives detection capability all around the vehicle (see Figure 2). Since each radar unit covers more area with higher detail, fewer are needed per vehicle. This not only reduces upfront hardware costs but also simplifies integration and ongoing maintenance whilst reducing the number of points of potential failure. Traditional perception stacks with multiple LiDARs, cameras, and radars require intensive sensor fusion processing, which adds further to vehicle complexity and computational load. By consolidating coverage and improving fidelity through a smaller number of high-performance radar units built with automotive-grade reliability, Oxford RF enables manufacturers to simplify their designs and cut costs without sacrificing perception quality.

Figure 2. Overlapping fields of view achieved by fitment of four Oxford RF solid state radar units, one at each corner of a vehicle thereby achieving 360-degree coverage.
The wider field of view of the Oxford RF system brings a further critical safety-related benefit. As shown in Figure 2, almost every region around the vehicle has coverage from more than one single radar system. For a radar-reflective object, a single radar unit can provide the relative distance of that object based on the time of flight and frequency modulation of the emitted radiation. The relative velocity of that object towards or away from the radar unit can also be calculated using change in frequency of the reflected radio waves, known as the Doppler shift. However, the orientation of the object is ambiguous for a single radar unit. Figure 3 illustrates this. In the left image, the red vehicle ahead is signalling to move into the right lane but has not yet started the manoeuvre. In the right image, the green vehicle head is located the same distance from the radar-equipped silver vehicle but has started to turn, heading into the adjacent lane. For both situations, the signal from a single radar would be the same. However, information about the orientation of the vehicle can only be inferred from relative motion tracking over time, which has memory and compute implications.
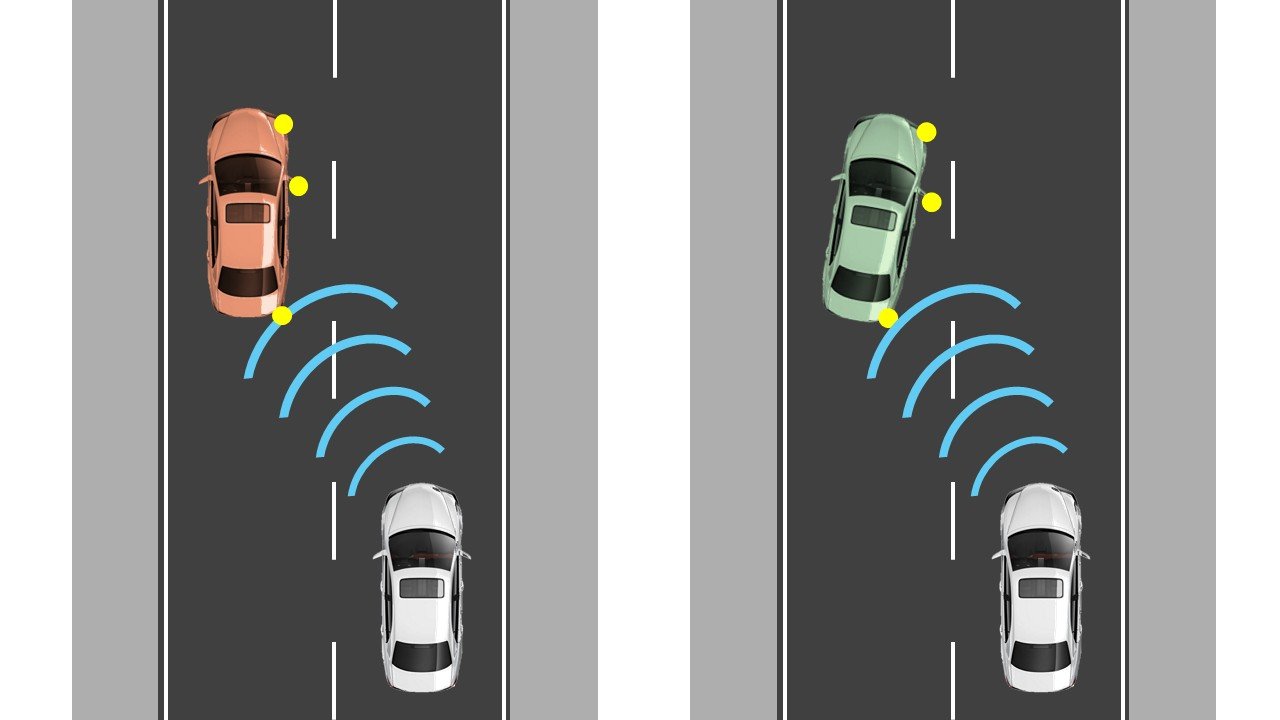
Figure 3. Top-down view of two similar situations where the radar-equipped silver vehicle is approaching another vehicle signalling to move right from the adjacent lane. A single radar cannot instantly detect the difference between the two situations illustrated here whereas the overlapping fields of view of Oxford RF radar units can provide vehicle orientation as well as location, providing better data to inform safer decision-making by automated driving systems.
Since all regions surrounding the vehicle equipped with the Oxford RF radar units have coverage by at least two fields of view, accurate position and heading information of an object can be determined instantly using the relative range and velocity of the object from two or more radar units. This could be critical in determining the location and orientation of specific hazards and the ability to make reasonable predictions about their future movement - such as a pedestrian about to step into the road. The benefits of the Oxford RF systems therefore augment the traditional advantages of radar over other sensor types, such as radar’s reliability in conditions of precipitation or poor visibility, and relatively low power consumption and cost. For AVs, this means better hazard detection and ultimately driving performance that is both objectively and subjectively safer.
Interestingly, Oxford RF refers to the enhanced capability for perception by AVs using their radar arrays as ‘6D’ data. These six dimensions are:
Range (1D): The distance between the radar sensor and objects in its field of view.
Azimuth (2D): The horizontal angle of objects relative to the radar sensor's position, typically measured in degrees.
Elevation (3D): The vertical angle of objects relative to the radar sensor's position, providing information about the altitude of objects.
Velocity along the road (4D): The longitudinal velocity and location of objects relative to the radar sensor.
Velocity across the road (5D): The lateral velocity in addition to the longitudinal speed and location. When combined, the longitudinal and lateral speed describe the orientation or rotation of objects, which can provide additional context for their movement. (formally called the kinematics).
Vertical Velocity (6D): This gives a measure of elevated orientation, like a car moving uphill. The 6 dimensions (3D position + 3D velocity) provide the ability to accurately categorise the movement of objects based on their characteristics, such as size, shape, and orientation.
For AVs to achieve an acceptable level of perception accuracy and reliability is extremely challenging. Public tolerance for machine-caused errors is likely to be far lower than for human ones. That means AVs must not only avoid collisions but they must look safe, feel safe, and act in ways that align with human expectations of prudent, cautious driving behaviour. Oxford RF’s radar systems and 6D data capability contribute directly to this vision. By delivering clear, reliable, and consistent perceptions of the environment around the vehicle, they empower AV developers to create systems that make safe, informed decisions. From identifying a cyclist approaching in what would be considered a blind spot for a human driver to detecting erratic behaviour from other road users, this enhanced awareness is foundational to safe automated driving.
Safe driving is not just about avoiding collisions. It is also about creating an environment where everyone on the road feels secure, respected, and protected. As we transition into an era of automated mobility, perception technologies will be pivotal in defining how safe our roads can become. Oxford RF’s radar systems represent a major leap forward in this regard. By providing wide coverage, high resolution, weather-resilient performance and cost effectiveness, they offer a compelling solution to one of the most critical challenges in AV design, improving perception with simpler sensor arrays and making scalable AV development and deployment more accessible. In redefining what it means for a vehicle to “see” the world around it, Oxford RF is helping to establish what it means for an AV to be safe.